osm2lanes
12 March 2022, FOSSGIS OSM-Samstag
Dustin Carlino & Michael Droogleever
Intro
- These slides: https://dabreegster.github.io/talks/osm2lanes/slides.html
- Contribute: https://github.com/dabreegster/talks
About Dustin
- https://twitter.com/CarlinoDustin
- A/B Street since 2018
- Alan Turing Institute since December 2021
About Michael
- https://github.com/droogmic/
- https://www.openstreetmap.org/user/droogmic
- Software Engineer, ASML, Netherlands since 2018
Talk Outline
- Background
- How it works today
- Complications
- Next steps / contributing
Part 1: Background
A/B Street
- a bunch of tools to explore less cars in cities
- all work off a heavily processed map representation
- road and intersection geometry
- driveways between buildings and roads, parking lot capacity
- turn restrictions, traffic signal timing, routing
Edit Roads
Simulate Traffic
Plan Bike Networks
Low-traffic Neighborhoods
Sharing Code
- https://github.com/a-b-street/abstreet/discussions/789
- https://github.com/a-b-street/abstreet/blob/master/raw_map/src/lane_specs.rs
- Other projects looking at OSM lanes in detail
- StreetComplete, Map Machine, Bjorn’s JOSM plugin, shared-row, Cycle Streets, 3D Street
Why’s this hard?
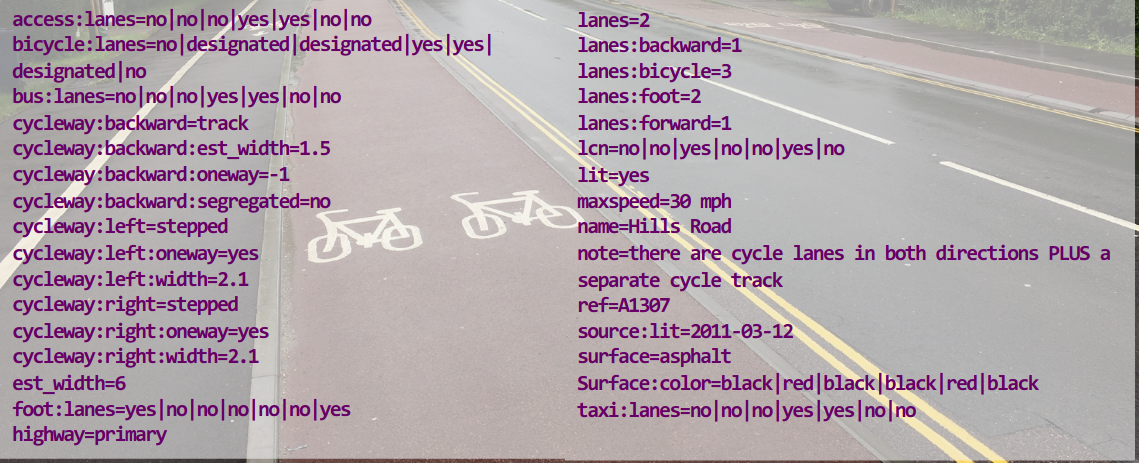
Why does it have to be hard?
From left to right:
[
{ type=sidewalk, surface_color=black },
{ curb },
{ type=cycle, direction=forward, surface_color=red, est_width=1.5 },
{ curb },
{ type=travel, surface_color=black, direction=forward, allow taxi },
{ type=travel, surface_color=black, direction=backward, allow taxi },
{ curb },
{ type=cycle, direction=forward, surface_color=red, est_width=1.5 },
{ curb },
{ type=sidewalk, surface_color=black },
]- Arguments for mapping as separate ways
- geometry: doesn’t help
- per-lane detail: yes!
End-user Stories
- vector map of whole world showing lane tagging
- Streetmix style editor for lane tagging
- both of these help improve lane tagging
- road space studies
- 60% of width used by 20% of people
Part 2: How it works today
Web demo: https://a-b-street.github.io/osm2lanes
Input
- An OSM way’s tags
- A locale (country / region code), for inferring if not explicitly defined, for example
- tag meaning
- left- or right-handed driving
- lane widths
- lane separator styles
Output
https://www.openstreetmap.org/way/22760280
{
"Ok": {
"road": {
"lanes": [
{
"type": "travel",
"direction": "backward",
"designated": "bicycle",
"width": 2.0
},
{
"type": "separator",
"markings": [
{
"style": "solid_line",
"width": 0.2,
"color": "white"
}
]
},
{
"type": "travel",
"direction": "backward",
"designated": "motor_vehicle",
"width": 3.5
},
{
"type": "separator",
"markings": [
{
"style": "dotted_line",
"width": 0.2,
"color": "white"
}
]
},
{
"type": "travel",
"direction": "forward",
"designated": "motor_vehicle",
"width": 3.5
},
{
"type": "separator",
"markings": [
{
"style": "solid_line",
"width": 0.2,
"color": "white"
}
]
},
{
"type": "travel",
"direction": "forward",
"designated": "bicycle",
"width": 2.0
}
],
"highway": {
"highway": {
"Classified": "Secondary"
},
"lifecycle": "Active"
}
},
"warnings": [
"unimplemented: access, bicycle=designated"
]
}
}Output, osm2lanes
- type
- travel, parking, shoulder, separator
- designated
- foot, bike, motor vehicle, bus
- (in the future we will add
access=*per lane)
- direction
- forward, backward, both
- width
- markings / separators
Inverse, lanes2osm
- An easier OSM lanes editor
- Pick a way, grab its tags
osm2lanes- Edit the lanes with something Streetmix-like
lanes2osm- Upload the diff
- Maybe a tag “autoformatter” in iD/JOSM?
- Complications?
Code overview
- https://github.com/a-b-street/osm2lanes
- Rust, Python, and Kotlin
- Originally…
- make it easy for people to get involved, no matter the preferred language
- “not hard” to keep the implementations in-sync
- Going forward…
- Rust can target any build environment
Tests!
https://github.com/a-b-street/osm2lanes/blob/main/data/tests.yml
Code Walkthrough
- Lane schema
- Nested switch case logic by transport mode
special case non-motorized paths, bus, bike, parking, sidewalks / shoulders - forward and backward lanes handled separately, lanes usually appended inside-to-out
- separators inserted last based on the two adjacent lane types
Part 3: Complications
Errors are rampant
unsupported: cycleway=* with any cycleway:* values
bicycle = designated
cycleway = lane
cycleway:left = separate
cycleway:right = lane
highway = secondary
lanes = 4
lanes:backward = 2
lanes:forward = 2
lcn = yes
maxheight = default
maxspeed = 25 mph
name = Dexter Avenue North
oneway = no
surface = pavedError and Warning Handling
- issues encountered in tags classified as
- ambiguity
- unimplemented
- unsupported
- deprecated
- error is thrown if sufficiently problematic
- otherwise a warning is added, and we try and continue
Inferred Values
not all data is right or wrong, usually it is missing
- Direct tagged data
- Calculated (total width must be the sum of the other widths)
- Inferred (splitting total width over all the lanes evenly)
- Default based on locale
- Reasonable default
the data consumer wants to know what lane data was tagged and what was a guess?
Designated vs Allowed
- footpaths allowing, but not prioritizing, cyclists
- bus lanes allowing cyclists
this is a generic library
- most rendering applications simply wants to know what the designated purpose is
- a routing application wants to know what the full access is
Separate Ways
https://www.youtube.com/watch?v=LatorN4P9aA
- Punt to the caller, feed in all of the ways?
- next talk will go into more detail
- just look for everything in between buildings/parks/water?
- also provide geometry, so we can glue things together in the right order?
- inferred separators
Part 4: Next steps / contributing
Test cases
we need a healthy combination of:
- real world examples (with mapillary / pictures to know what exists on the ground)
- esoteric examples, when real world examples cannot be found to test the extremes
osm2lanes
Most implementation is in Rust, but Rust is not too hard to learn.
Try one of the good first issues!
Web Interface
Web interface: https://a-b-street.github.io/osm2lanes/
- written almost entirely in Rust
- allows for rapid improvement of implementation
osm2lanes Future
Per-lane Width
- Use it when it’s tagged
- If we know the curb-to-curb width or entire road width…
- sanely distribute width to known lanes
Per-lane Data
- turn:lanes
- allowed vehicles (bus lanes with bikes or taxis)
- time-restricted turns or parking
- surface type
- speed limit
Locales
Library
- This library needs to be used to be useful.
- If you know a project that can use this functionality, help contribute there to make it a dependency.
- Use it on your own projects!
Web map
https://github.com/a-b-street/osm2lanes/blob/main/web/index.html
- Click a road, see its lanes in cross-section view
- Rust <-> Javascript API
- Publish on npm